Autonomous Vehicles:
Worked on small Linux based vehicles equipped with GPS, Lidar, and Gyro. The task was to make them drive autonomously using Robot Operating System (ROS2). I implemented lidar plotting and PID tuning to enable smooth interpretation of the lidar data. Additionally implemented 3rd Order and Stanley controllers in order to use gyro and location data to accurately follow a plotted path

The Vehicle.

Planned path vs recorded path
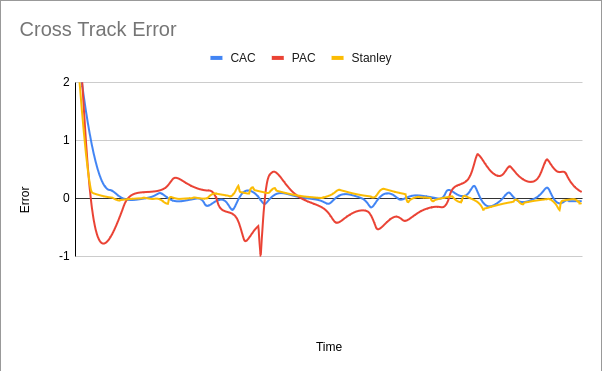
Simulated error of different path following controllers.
Machine Intelligence Laboratory (MIL):
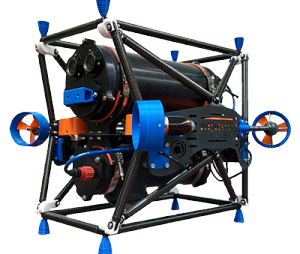
I work for the MIL research lab at UF where we are currently working on building a new autonomous submarine to replace our previous design. This sub will compete at an international competition called RoboSub. Amazingly, after only 1 semester, I was appointed lead of the fabrication team, where we are in charge of designing and manufacturing many of the components that are going on the new platform.

First Robotics:
Here are videos of past First Tech Challenge (FTC) robots that I designed, built, and helped program.